签到有奖
消息提醒
运维工程师专区
官方商城
扫码分享好友 任选多种周边
KUKA机器人有个叫 KUKA.PLC mxAutomation的控制软件,这个可以与PLC进行组态连接,实现PLC对KUKA机器人的控制,这个软件需要购买吗?网上有没有下载资源?最近手头有个项目正好可以用到,想尝试着用下。有了解的吗
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
帖子链接:https://www.ad.siemens.com.cn/club/bbs/post.aspx?a_id=1413969&b_id=66&s_id=0&num=18
PLC 控制机器人?
一般是PLC 给机器人 发送相关指令和参数吧。机器人有自己的控制系统。
如果 你仅仅是要 KUKA.PLC mxAutomation软件,这个是KUKA 的产品,你找错地方了!
楼主,您这求助帖怎么是“探讨”呢?
不能太较真,楼主一看就是脾气很大的人
在这里许多大咖应该做过这样的项目,但是不一定能问到,现在PLC控制机器人的案例比较多了!
楼主 想怎么用PLC控制KUKA机器人啊 要是实现PLC与第三方设备简单IO通信没有那么麻烦
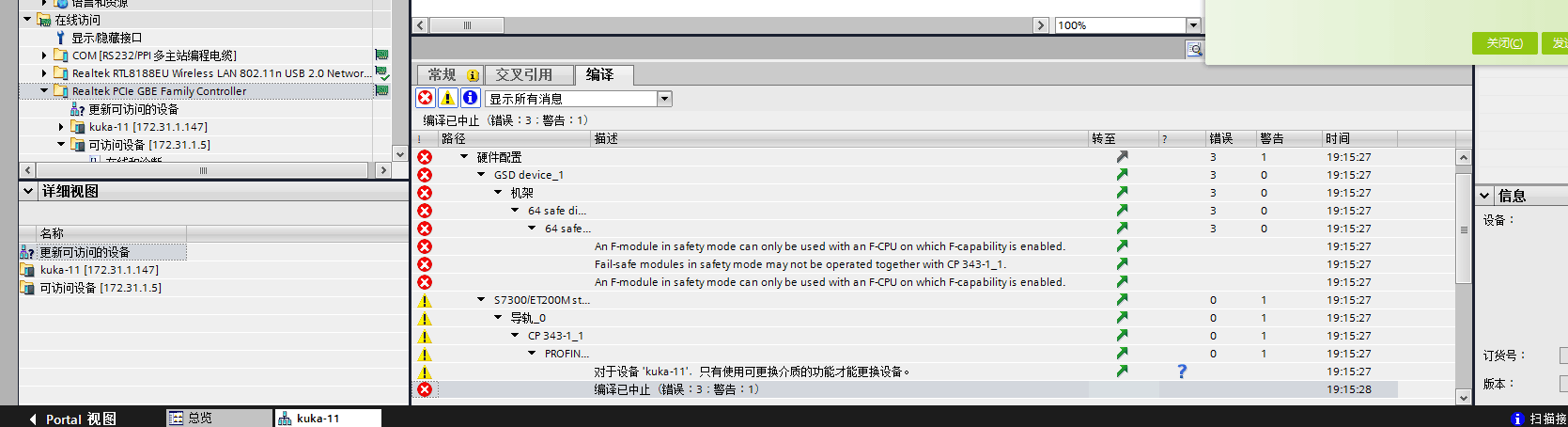
将库卡GSD/GSDML文件导入step7或 TIA,具体IO通信内容双方约定
可以参考:
http://www.ad.siemens.com.cn/club/bbs/post.aspx?a_id=1417348&b_id=50&s_id=76&num=0#anch
由KUKA机器人有限公司提供的KUKA.PLC mxAutomation功能包,可以让用户通过SIMATIC控制器,用KR C4控制系统在基本运动命令级控制KUKA机器人。
机器人或者说机器人控制器作为PROFINET IO 设备通过的GSDML文件加载在SIMATIC控制器的硬件组态中。这会使得在机器人和SIMATIC控制器之间做数据交换的时候,能获得PROFINET标准所有的优势。
机器人的地址在PLC编程中通过功能块分配,此功能块是跟KUKA.PLC mxAutomation功能包一起作为一个模块指令库提供的。这些功能块的作用与已被广泛应用的PLCopen标准相似,也集成在SIMATIC CPU中的运动功能中。可以通过模块指令库和基本运动指令的功能块打开和监视机器人,比如点对点运动和线***或圆周运动,都可以传送给机器人。
对于机器人控制器,是负责控制机器人运动的,KUKA.PLC mxAutomation功能包包括一个命令解释器,这个命令解释器安装在机器人控制器上并将从PLC程序发出的机器人指令转换为机器人的路径规划。因此KR C4机器人控制器能够使用所有运动相关和安全相关的功能,机器人控制器使用常规精度执行机器人的运动,与SIMATIC CPU负载无关。
KUKA.PLC mxAutomation可以运行在所有使用KR C4控制器的KUKA机器人上,因此可以支持全部全系列性能的机器人,从有效负载最小的KR AGILUS可支持到6kg,到有效负载最大的KR 1000 titan可支持1300kg。
当机器人的运动是面向事件的以及要灵活适应将要处理的任务时,KUKA.PLC mxAutomation 功能包特别适用于各种类型的应用处理和简单的线***。
使用KUKA.PLC mxAutomation时有以下优点:
通过PROFINET连接所有功能组件,例如SIMATIC CPU和机器人控制器。
通过mxAutomation功能库,机器人编程仅需要PLC编程的知识。
机械和机器人控制融合成一个单元,以便机器人能够完全的集成到机器的操作理念。甚至机器人学习过程,也就是手动巡回到机器人的位置并将目标点存储在SIMATIC控制器中,也可以通过SIMATIC控制器(单点操作)的人机交互界面(HMI)实现。
来自KUKA Roboter有限公司的带有控制器特殊模块库的KUKA.PLC mxAutomation功能包支持以下SIMATIC系列:
STEP 7 V5.4 用于SIMATIC S7-300和S7-400控制器系列
STEP 7 (TIA Portal)用于SIMATIC S7-300和S7-400控制器系列
STEP 7 (TIA Portal)用于the SIMATIC S7-1500控制器系列
这些所有不同系列的控制器都能对每个机器人用一个至少254字节的IO地址区。取决于IO地址,一个SIMATIC控制器通过KUKA.PLC mxAutomation功能包最多可以控制5个机器人。KUKA.PLC mxAutomation功能包的命令解释器可以通过软件版本为V8.3的KR C4控制器 应用在所有的KUKA机器人上。
另外,产品SINUMERIK Integrate Run MyRobot可供SINUMERIK数控系统使用,KUKA机器人的控制和操作可以通过KUKA.PLC mxAutomation功能包在SINUMERIK控制器中集成 。
感觉不是PLC控制机器人吧,应该是互相通信。
例如PLC告诉机器人,我东西备齐了,你可以动作了,机器人动作完成后告诉PLC,我这个完成了,可以做下一个了。机器人具体怎么动作自己控制,
把控制修改为协作更加合适!
PLC是控制器,机器人是一个设备,他们都有不同的控制任务,PLC是一个控制系统,机器人也有自己的控制系统,现在的问题是两个控制系统之间相互协作的问题,你可以选择很多的通讯方式 PROFIBUS PROFINET TCP/UDP 等等。是一个通信问题,不应该是一个控制问题。
这种控制在钢铁行业用的不多,在汽车行业用的很多。
PLC在控制中有两个作用:
一是机器人用switch语句编程,不同的程序号机器人完成不通的动作,PLC选择程序号,机器人完成动作。
二是两台或多台机器人共同工作时,用PLC作干涉区,防止机器人碰撞。
不错,学习了
现在一般都是直接以太网连接的 买网卡在库卡的机器人连接到机器人 然后双方约定规则进行信息交换和控制
学习了,谢谢千里不留名
知道原因了,mxautomation应用真的很烦,有点多此一举的感觉,就是把机器人的示教器扔掉,把机器人的移动指令全写在plc程序里写的这么一个功能。需要配套的proconos软件,profinet通讯。总之plc全搞定。
分享
扫码分享好友 任选多种好礼
收藏
有帮助
欢迎您访问支持中心!
丰富的视频,全方位的文档,大量的网友交流精华……
为了更好的完善这些内容,我们诚邀您在浏览结束后,花20秒左右的时间,完成一个用户在线调查!
感谢您的支持!
密码至少8位,包含大、小写字母,数字和符号至少三种。
允许邮箱和手机接收来自支持中心网站的信息
我已同意《支持中心网站注册协议和隐私政策》
微信登录扫码一键登录
验证码登录
密码登录
二维码失效点击重试
打开微信扫一扫,快速登录/注册
未注册手机验证后自动登录,注册即代表同意《支持中心网站注册协议和隐私政策》
三日内免验证登录
短信登录
登录












 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城
 分享帖
分享帖 故事帖
故事帖 技术探讨帖
技术探讨帖 求助帖
求助帖 西家杂谈
西家杂谈 投票帖
投票帖







 复制链接
复制链接














 短信登录
短信登录
