
















 西门子官方商城
西门子官方商城

- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
CUMC基本定位功能简明调试
文档编号:A0483|
文档类型:操作指南|
发布时间:2024年02月18日
- 0
- 339
- 5536
6se70 伺服控制器(MC)集成了定位功能,要实现定位控制可以有三种方法:直接设定位置控制器,基本定位功能(自由功能块),F01定位功能。 ......
6se70 伺服控制器(MC)集成了定位功能,要实现定位控制可以有三种方法:直接设定位置控制器,基本定位功能(自由功能块),F01定位功能。
1 基本定位功能概述
基本定位功能是MC伺服控制器在自由功能块中固化的功能,可以免费使用,实现运动控制系统中的一些简单定位功能,如:homing ,position ,setup 功能。可以选择旋转轴和线性轴,设定定位限位开关等功能,能满足大部分定位应用的要求。
功能图在说明书的789a,789b,789c 部分,如图1所示。
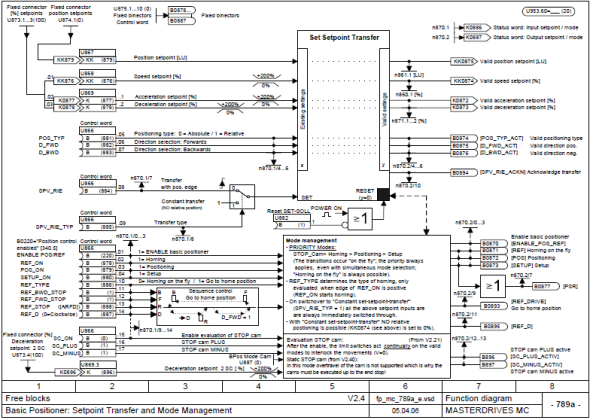
图1
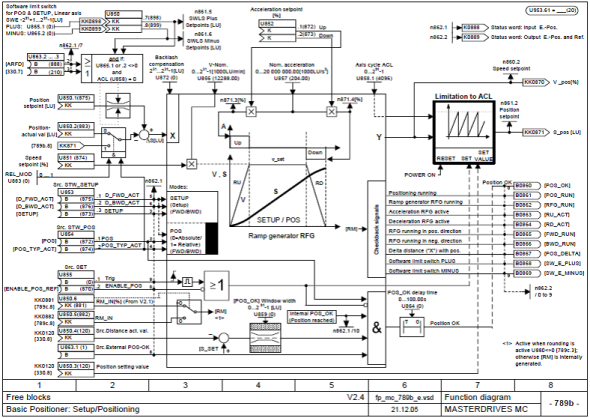
图2
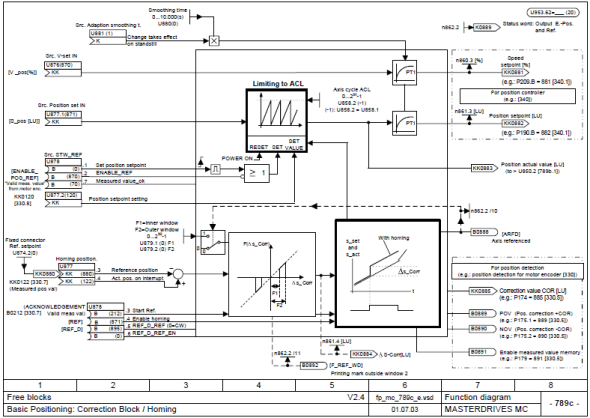
图3
2 启用基本定位功能
首先设置MC 装置的参数,使装置能在速度闭环模式驱动运行(参见调试手册P060=3或P060=5的调试步骤 ),然后设定参数激活基本定位功能,流程如下:
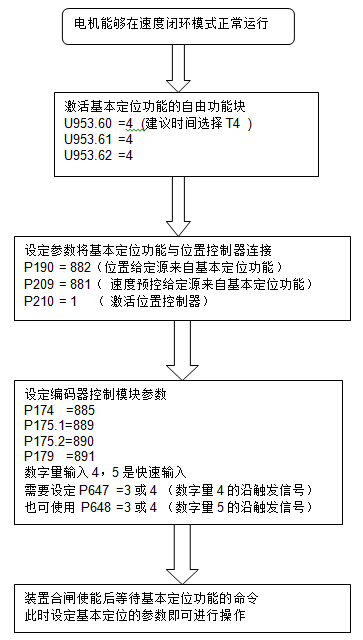
图4
3 基本定位功能的参数设定
U856 ---速度的标称值,即100%转速对应的 LU, 通常设定为额定转速,单位1000LU/min
例如 电机额定转速3000rpm , 编码器脉冲4096/rev,则U856=4096*3000/1000=12288
U857---加速度标称值
U858---旋转轴线性轴选择
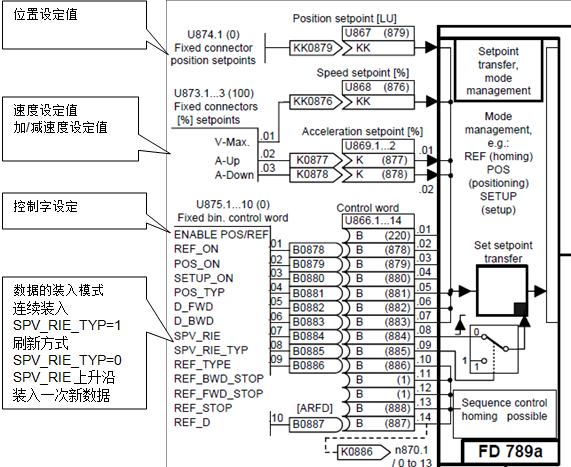
图5
装置合闸使能后,进入o011 状态,等待速度,此时对控制字进行设定可以实现工作模式。首先ENABLE POS/REF,基本定位功能使能激活(B0220连接量使能),然后可以进行各种工作模式的操作。
3.1 Homing mode (回零模式)
Homing mode (回零点) 包含两种方式Homing on the fly模式和Homing movement模式。
3.1.1 Homing on the fly模式
• Homing 模式使能REF_ON =1 ;• 模式选择REF_TYPE=0 ;• 通过数字量输入4或5来触发动作,也可与SETUP或 POSITION模式一同使用。
3.1.2 Homing movement 模式
• 模式选择REF_TYPE=1 ;• 选择开关动作有效时的运行方向,REF_D=0 正向运行过程中,开关动作有效REF_D=1 反向向运行过程中,开关动作有效• 设定启动时的运行方向,正向D_FWD=1或反向B_FWD=1• 为正向限位D_FWD_STOP 和反向限位B_FWD_STOP分配两个数字量开关,高电平表示到达限位• Homing 模式使能REF_ON 上升沿激活动作,开始运行 ;
工作时序如下(图6):
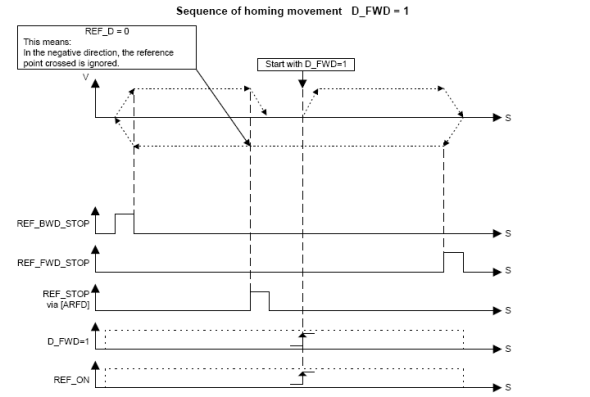
图6
3.2 Set up mode (速度模式)
• 使能SETUP_ON=1• 设定运行方向D_FWD或B_FWD上升沿触发运行动作• 运行速度设定U868• 也可以在设定好方向后SETUP_ON上升沿触发动作
工作时序如下(图7)
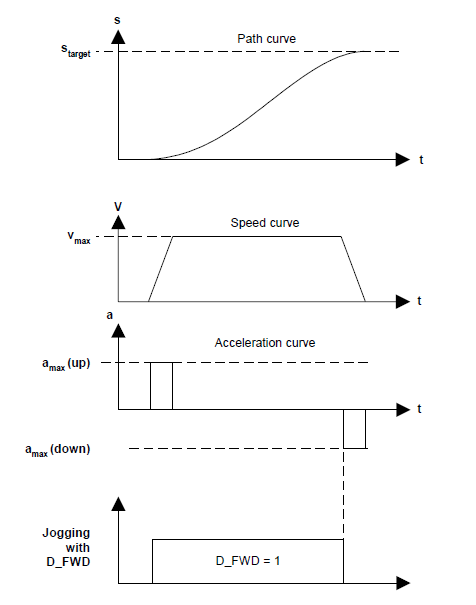
图7
3.3 Position mode (定位模式)
Position 模式包含两种定位方式,绝对定位方式和相对定位方式。
3.3.1 Absolute position (绝对定位方式)
• 使能POS_ON=1• 使能POS_TYP=0• D_FWD=1正向运行到设定位置B_FWD=1 反向运行到设定位置D_FWD=0,B_FWD=0最短路径运行到设定位置• 位置设定U867,速度U868
3.3.2 Relative position (相对定位方式)
• 使能POS_ON=1• 使能POS_TYP=1• 数据装入方式SPV_RIE_TYP=0• 位置设定U867,速度U868• 运行方向由设定位置的符号决定• 每次SPV_RIE上升沿触发一次新的相对定位运行
4使用DriveMonitor 软件调试基本定位功能
DriveMonitor 软件为简单定位功能提供了可视化的调试界面,可以方便实用。
首先将PC机连接到MC装置上,选择在线模式,连接成功后,在Drive Navigator 中出现 Basic position operating screen ,鼠标点击图标进入 (图8)。
注意:在使用前需要完成基本定位功能的启动参数设定。
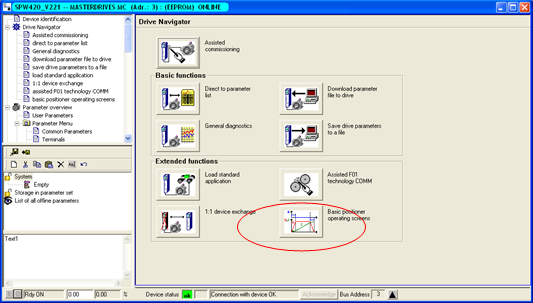
图8
点击Basic position 选项后,会显示如下界面(图9),想要进行面板的控制,需要点击Request master control 按钮:
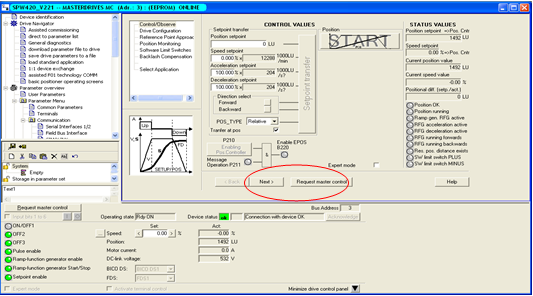
图9
选择Request master control ,激活面板控制后,会出现对话框(图10),直接选择ok按钮
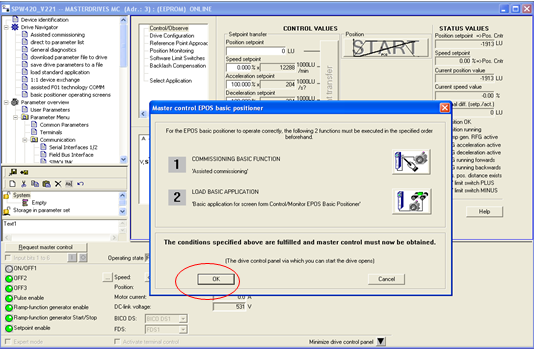
图10
请求控制成功后,Request master control 按钮变为黄色,同时自动将速度环也设定为主控状态,可以对基本装置的控制字进行操作(图11):
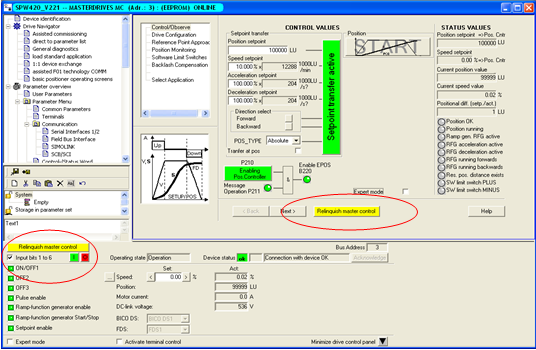
图11
请求控制后,可以在basic position 控制窗口设定参数进行调试。首先需要单击
p210按钮,绿色为激活使能。(图12)
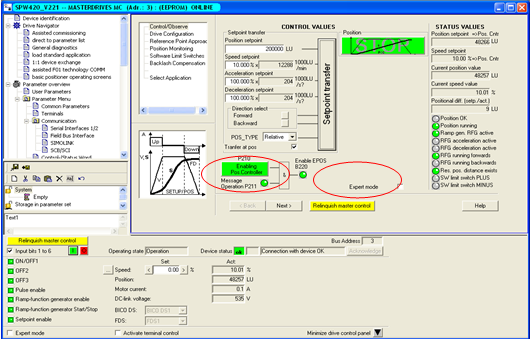
图12
可以通过勾选“Expert mode”进入专家模式,扩展set up 和 homing 功能到窗口中,然后根据控制字进行操作。(图13)
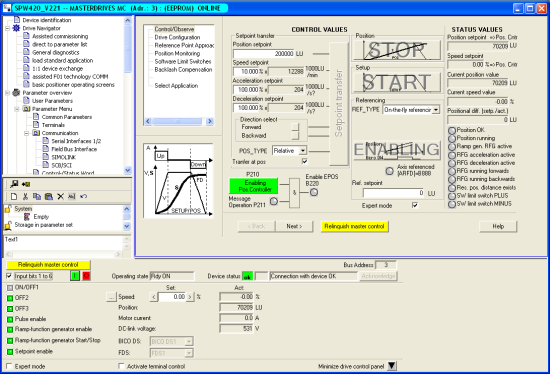
图13
Homing 模式需要使用数字输入3或4快速开关,可以通过参数P647或p648 定义。
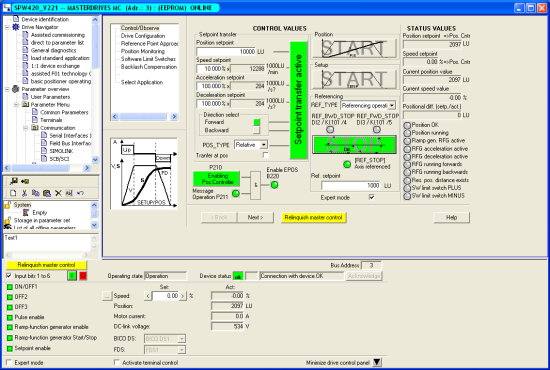
图14
5. 使用DriveMonitor 软件生成基本定位功能参数脚本
通过drivemonitor可视化界面,设定基本定位功能参数。进入界面后,选择Next按钮进入设定界面(图15)。
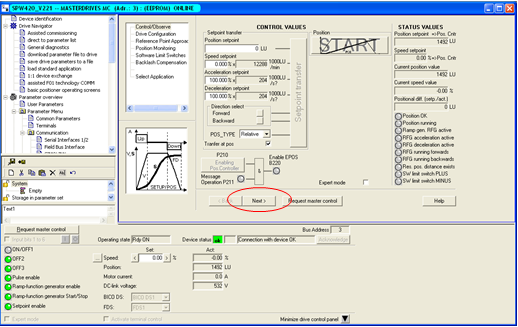
图15
进入Drive Configuration 界面可以配置轴的类型,以及编码器旋转一圈对应的长度(图16):
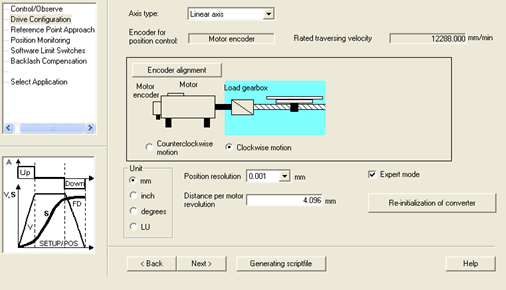
图16
在reference Point Approach 界面设定额定速度以及加速度,同时可以点击Homing mode 按钮进入Homing选择:
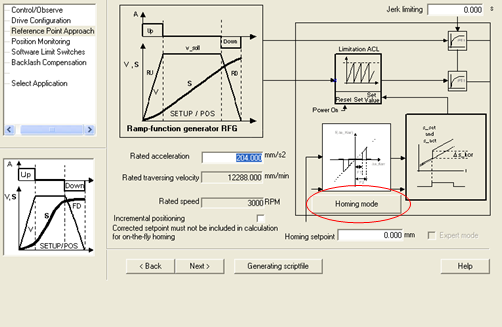
图17
可以在Homing mode 界面设定homing信号,以及运行方向:
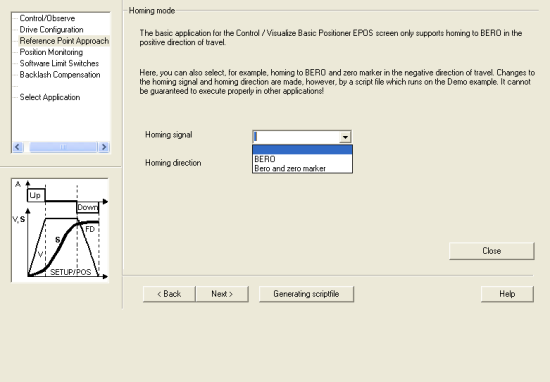
图17
Position Monitor 窗口可以进行定位精度监控范围设定:
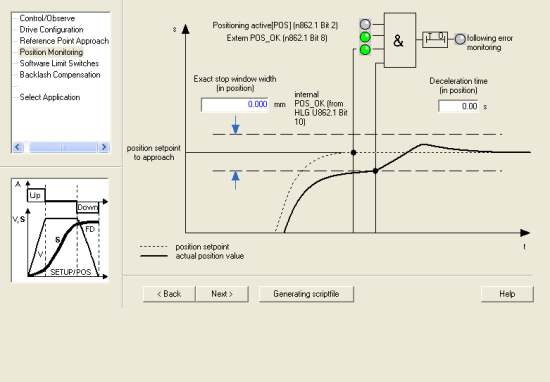
图19
定义软限位开关,针对线性轴时,可以设定最大及最小行程:
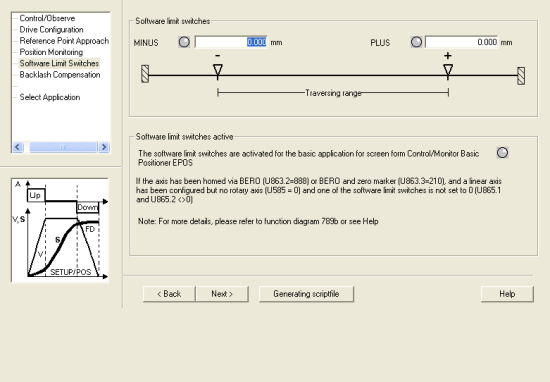
图20
定义齿轮等机械间隙补偿。
设定完成后可以选择Generating scriptfile 按钮,系统会自动根据前面设定的参数,生成脚本文件,然后将参数脚本文件下载到装置中即可生效。
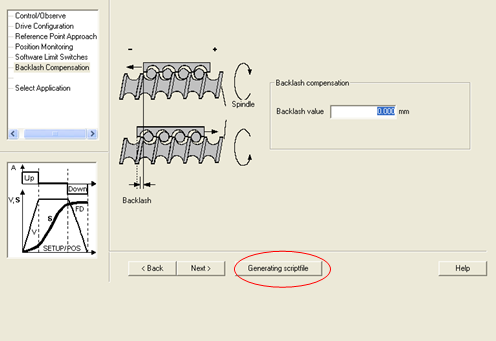
图21
系统中也设有标准的应用脚本,但是只提供了Basic application for the control 的应用,其余两个应用脚本是空的,无法使用。具体参数设置可以打开脚本查看,或选择help 按钮查看。
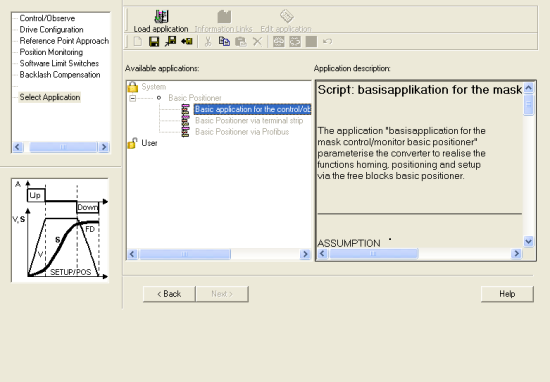
图22
关于每个设置参数对应的参数,可以通过Help 按钮来查看相应的帮助文档,点击每个窗口上对应的Help按钮即可弹出帮助文档。
关键词
伺服控制器,基本定位功能,DriveMonitor, 参数设定,脚本文件

剩余80%未阅读,请登录后下载/查看文档

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错





 关联文档
关联文档

















{{item.nickName}}