
















 西门子官方商城
西门子官方商城

- {{item.name}}
更多

定位轴

发布时间:2024年01月16日
- 0
- 10
定位轴组态
PTO控制方式--工艺对象TO参数组态
添加了“工艺对象:轴"后,可以在下图右上角看到工艺对象包含两种视图:“功能图”和“参数视图”。
功能图--基本参数--常规
如下图所示,基本参数中的“常规”参数包括“轴名称”,“驱动器”和“测量单位”。

①轴名称:定义该工艺轴的名称,用户可以采用系统默认值,也可以自行定义。
②驱动器:选择通过PTO(CPU输出高速脉冲)的方式控制驱动器
③测量单位:Portal 软件提供了几种轴的测量单位,包括:脉冲,距离和角度。距离有mm(毫米)、m(米)、in(英寸inch)、ft(英尺foot);角度是º(360度)。
如果是线性工作台,一般都选择线性距离:mm(毫米)、m(米)、in(英寸inch)、ft(英尺foot)为单位;旋转工作台可以选择º(360度)。不管是什么情况,用户也可以直接选择脉冲为单位。
『注意』测量单位是很重要的一个参数,后面轴的参数和指令中的参数都是基于该单位进行设定的。
功能图--基本参数--驱动器
选择PTO的方式控制驱动器,需要进行配置脉冲输出点等参数。
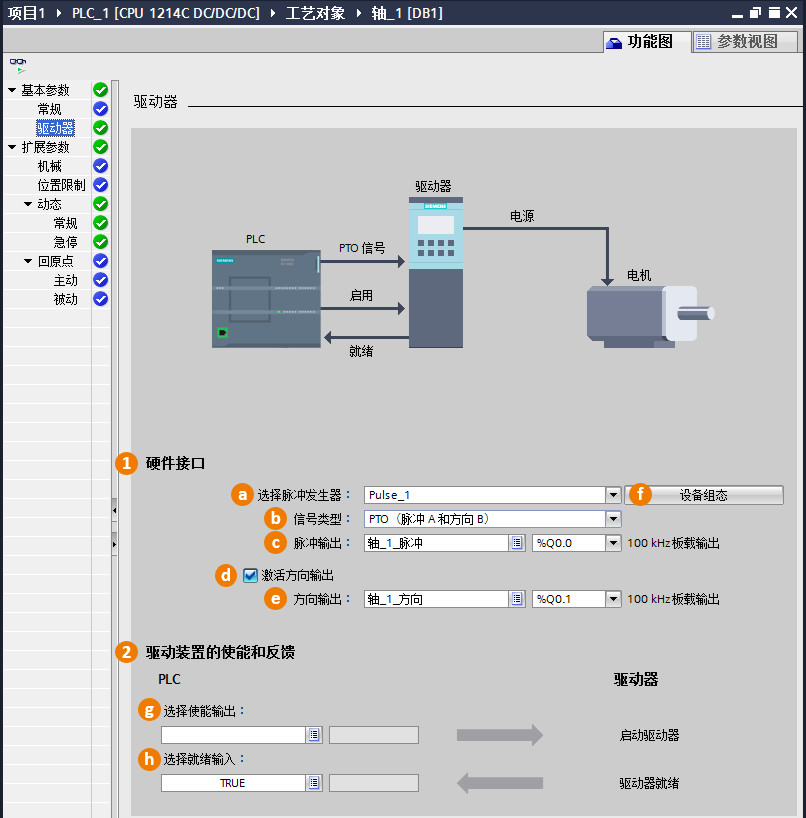
①硬件接口:
a 选择脉冲发生器:选择在“设备视图”中已组态的PTO。
b 信号类型:分成4种(前面已介绍过),根据驱动器信号类型进行选择。在这里以PTO(脉冲A和方向B)为例进行说明。
c 脉冲输出:根据实际配置,自由定义脉冲输出点;或是选择系统默认脉冲输出点。
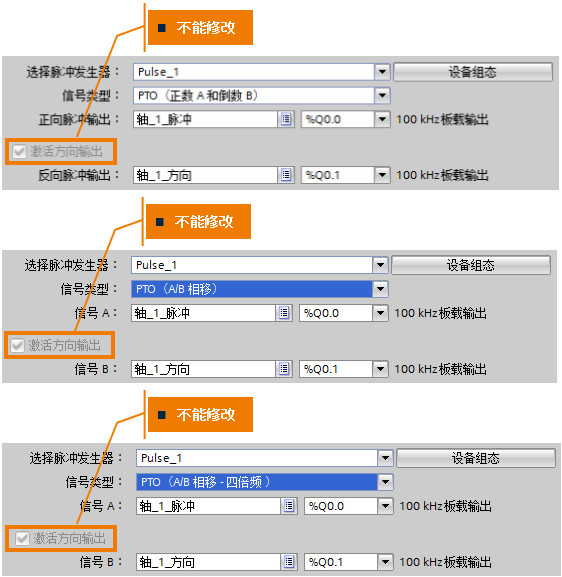
d 激活方向输出:是否使能方向控制位。如果在b步,选择了PTO(正数A和倒数B)或是PTO(A/B相移)或是PTO(A/B相移-四倍频),则该处是灰色的,用户不能进行修改。如下图所示:
e 方向输出:根据实际配置,自由定义方向输出点;或是选择系统默认方向输出点。也可以去掉方向控制点,在这种情况下,用户可以选择其他输出点作为驱动器的方向信号。
f 设备组态:点击该按钮可以跳转到“设备视图”,方便用户回到CPU设备属性修改组态。
②驱动装置的使能和反馈
g 选择使能输出:步进或是伺服驱动器一般都需要一个使能信号,该使能信号的作用是让驱动器通电。在这里用户可以组态一个DO点作为驱动器的使能信号。当然也可以不配置使能信号,这里为空。
h 选择就绪输入:“就绪信号”指的是:如果驱动器在接收到驱动器使能信号之后准备好开始执行运动时会向 CPU 发送“驱动器准备就绪”(Drive ready) 信号,这时可以选择一个DI点作为输入PLC的信号;如果驱动器不包含此类型的任何接口,则无需组态这些参数, 这种情况下,为准备就绪输入选择值 TRUE。
功能图--扩展参数--机械
扩展参数--机械主要设置轴的脉冲数与轴移动距离的参数对应关系。

①电机每转的脉冲数:这是非常重要的一个参数,表示电机旋转一周需要接收多少个脉冲。该数值是根据用户的电机参数进行设置的。
②电机每转的负载位移:这也是一个很重要的参数,表示电机每旋转一周,机械装置移动的距离。比如,某个直线工作台,电机每转一周,机械装置前进1mm,则该设置设置成1.0mm.
『注意』如果用户在前面的“测量单位”中选择了“脉冲”,则②处的参数单位就变成了“脉冲”,表示的是电机每转的脉冲个数,在这种情况下①和②的参数一样。
③所允许的旋转方向:有三种设置:双向、正方向和负方向。表示电机允许的旋转方向。如果尚未在“PTO(脉冲 A 和方向 B)”模式下激活脉冲发生器的方向输出,则选择受限于正方向或负方向。
④反向信号:如果使能反向信号,效果是当PLC端进行正向控制电机时,电机实际是反向旋转。
功能图--扩展参数--位置限制
这部分的参数是用来设置软件/硬件限位开关的。
软件/硬件限位开关是用来保证轴能够在工作台的有效范围内运行,当轴由于故障超过的限位开关,不管轴碰到了是软限位还是硬限位,轴都是停止运行并报错。
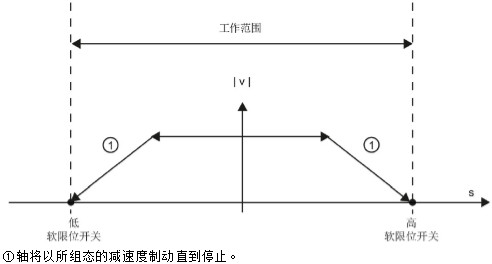
限位开关一般是按照下图的关系进行设置的:
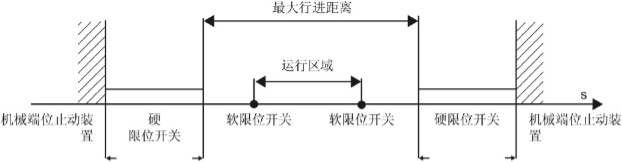
软限位的范围小于硬件限位,硬件限位的位置要在工作台机械范围之内。
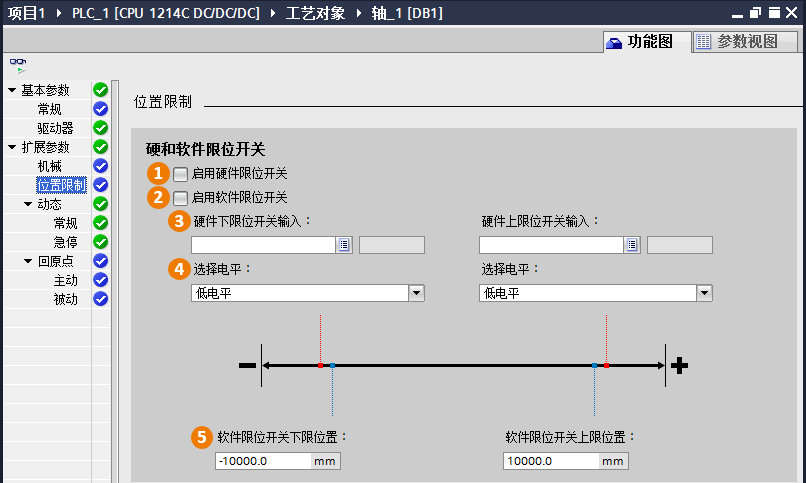
①启动硬件限位开关:激活硬件限位功能。
②启动软件限位开关:激活软件限位功能。
③硬件上/下限位开关输入:设置硬件上/下限位开关输入点,可以是S7-1200 CPU本体上的DI点,如果有SB信号板,也可以是SB信号板上的DI点。
④选择电平:设置设置硬件上/下限位开关输入点的有效电平,一般设置成底电平有效。
⑤软件上/下限位开关输入:设置软件位置点,用距离、脉冲或是角度表示。
『注意』用户需要根据实际情况来设置该参数,不要盲目使能软件和硬件限位开关。这部分参数不是必须使能的。
下图说明了轴在运行过程中会根据用户设置的软件限位的位置来提前以减速度制动,保证轴停止在软件限位的位置。
功能图--扩展参数--动态
扩展参数-动态包括“常规”和“急停”两部分。
常规
这部分参数也是轴参数中重要部分。
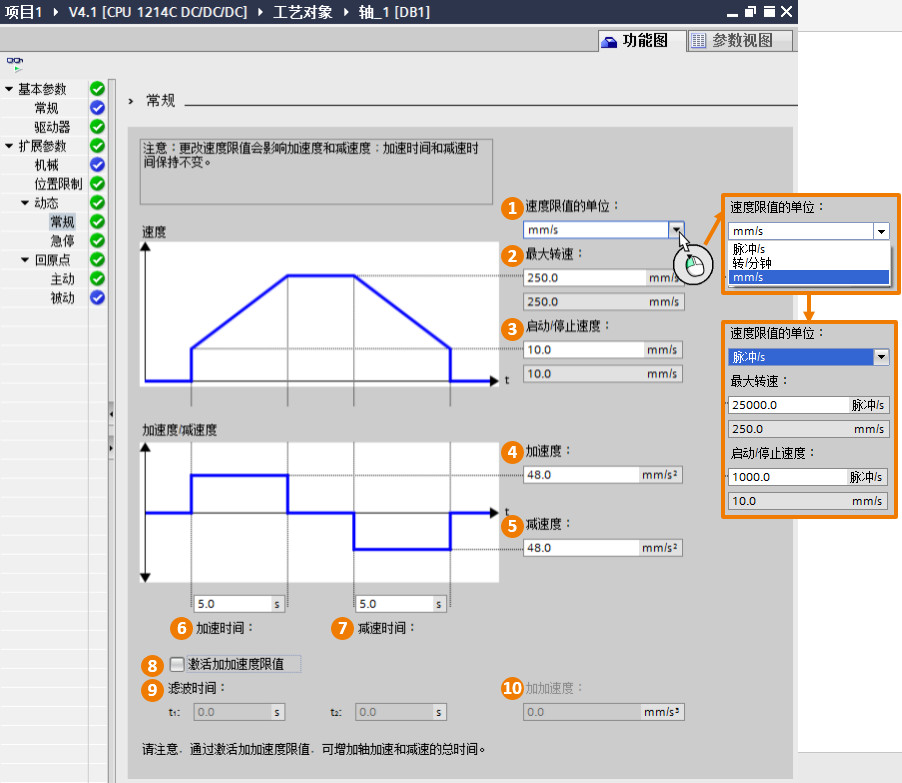
①速度限制的单位:设置参数②“最大转速”和③“启动/停止速度”的显示单位。
无论“基本参数--常规”中的“测量单位”组态了怎样的单位,在这里有两种显示单位是默认可以选择的,包括“脉冲/s”和“转/分钟”。
根据前面“测量单位”的不同,这里可以选择的选项也不用。比如:本例子中在“基本参数--常规”中的“测量单位”组态了mm,这样除了包括“脉冲/s”和“转/分钟”之外又多了一个mm/s。
②最大转速:这也是一个重要参数,用来设定电机最大转速。最大转速由PTO输出最大频率和电机允许的最大速度共同限定。
以mm为例进行说明:
在“扩展参数”“机械”中,用户定义了参数“电机每转的脉冲数”以及“电机每转的负载位移”,则最大转速为:

③启动/停止速度:根据电机的启动/停止速度来设定该值。
④加速度:根据电机和实际控制要求设置加速度。
⑤减速度:根据电机和实际控制要求设置减速度。
⑥加速时间:如果用户先设定了加速度,则加速时间由软件自动计算生成。用户也可以先设定加速时间,这样加速度由系统自己计算。
⑦减速时间:如果用户先设定了减速度,则减速时间由软件自动计算生成。用户也可以先设定减速时间,这样减速度由系统自己计算。
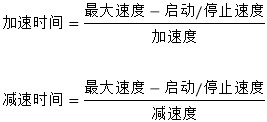
下面说明了“加速度”,“减速度”,“加速时间”,和“减速时间”之间的数学关系:
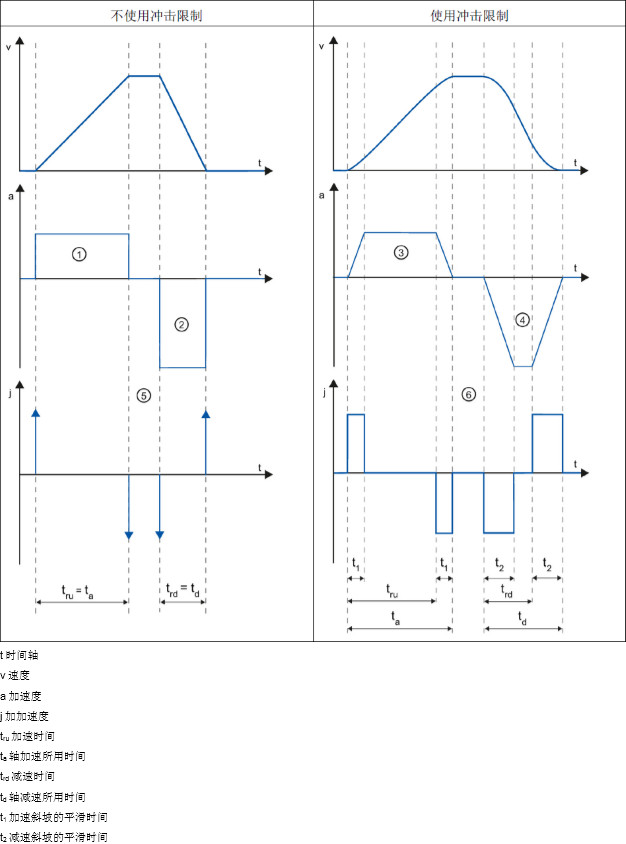
⑧激活加加速限值:激活加加速限值,可以降低在加速和减速斜坡运行期间施加到机械上的应力。如果激活了加加速度限值,则不会突然停止轴加速和轴减速,而是根据设置的步进或平滑时间逐渐调整。
⑨滤波时间:如果用户先设定了加加速度,则滤波时间由软件自动计算生成。用户也可以先设定滤波时间,这样加加速度由系统自己计算。
t1加速斜坡的平滑时间,
t2减速斜坡的平滑时间,t2值与t1相同。
⑩加加速度:
如下图所示,激活了加加速限值后,轴加减速曲线衔接处变平滑。
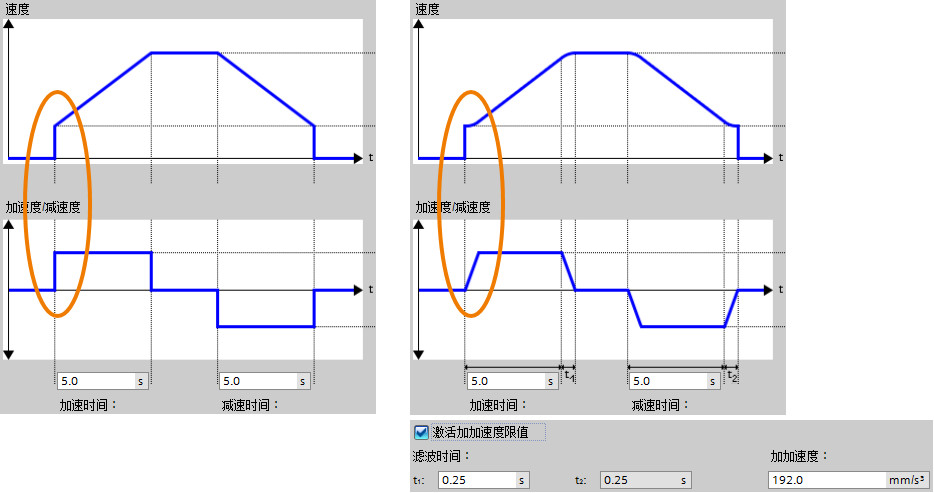
下图详细显示了在激活和不激活冲击限制的情况下轴的行为:
急停
什么情况下会让轴使用“急停”速度/时间这个参数:
- 轴出现错误时,采用急停速度停止轴。
- 使用MC_Power指令禁用轴时(StopMode=0或是StopMode=2)。
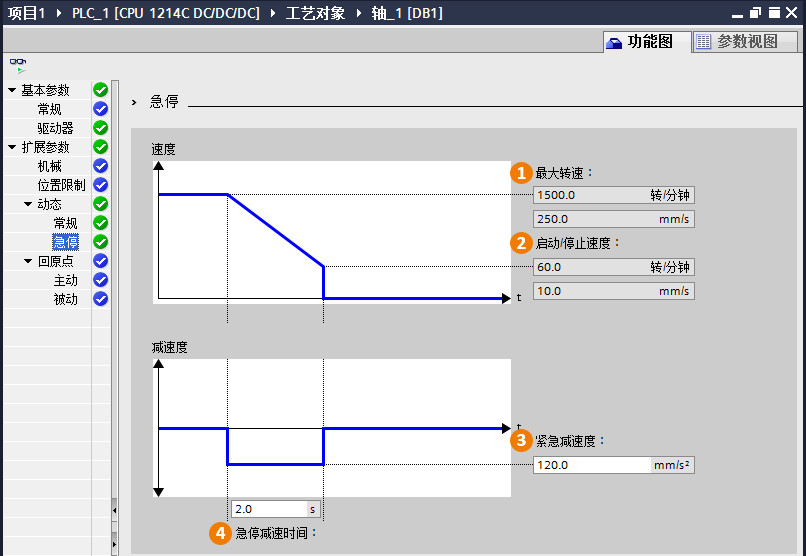
①最大转速:与“常规”中的“最大转速”一致。
②启动/停止速度:与“常规”中的“启动/停止速度”一致。
③紧急减速度:设置急停速度。
④紧急减速时间:如果用户先设定了紧急减速度,则紧急减速时间由软件自动计算生成。用户也可以先设定紧急减速时间,这紧急减速度由系统自己计算。
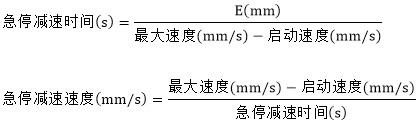
下面的公式列出了“急停减速时间”和“急停减速度”之间的关系:

根据实际应用中左右限位开关距离物理停止点的距离(如下图的E和F),以及电机可以达到的最大速度计算出来合适的急停速度,保证电机能够在撞到物理停止点前停止 。
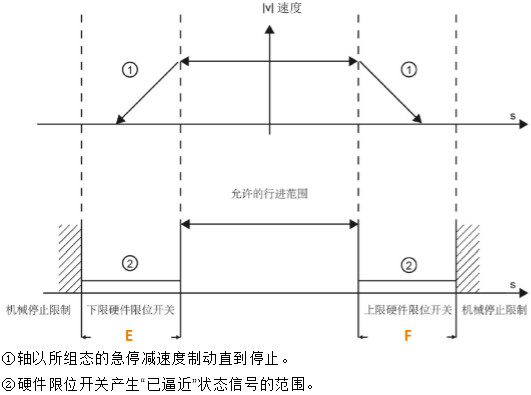
硬件限位开关的有效距离除以最大速度和启动速度的差值,就可以得到急停减速时间。
功能图--扩展参数-回原点
“原点”也可以叫做“参考点”,“回原点”或是“寻找参考点”的作用是:把轴实际的机械位置和S7-1200程序中轴的位置坐标统一,以进行绝对位置定位。
一般情况下,西门子PLC的运动控制在使能绝对位置定位之前必须执行“回原点”或是“寻找参考点”。
“扩展参数-回原点”分成“主动”和“被动”两部分参数。
主动
在这里的“扩展参数-回原点-主动”中“主动”就是传统意义上的回原点或是寻找参考点。当轴触发了主动回参考点操作,则轴就会按照组态的速度去寻找原点开关信号,并完成回原点命令。
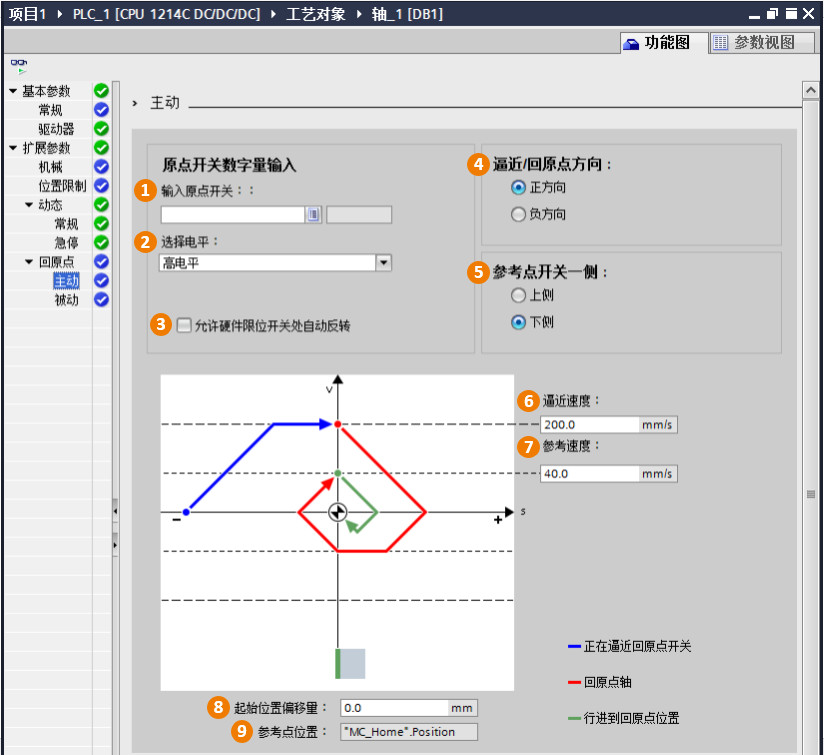
①输入原点开关:设置原点开关的DI输入点。
②选择电平:选择原点开关的有效电平,也就是当轴碰到原点开关时,该原点开关对应的DI点是高电平还是低电平。
③允许硬件限位开关处自动反转:如果轴在回原点的一个方向上没有碰到原点,则需要使能该选项,这样轴可以自动调头,向反方向寻找原点。
④逼近/回原点方向:寻找原点的起始方向。也就是说触发了寻找原点功能后,轴是向“正方向”或是“负方向”开始寻找原点。
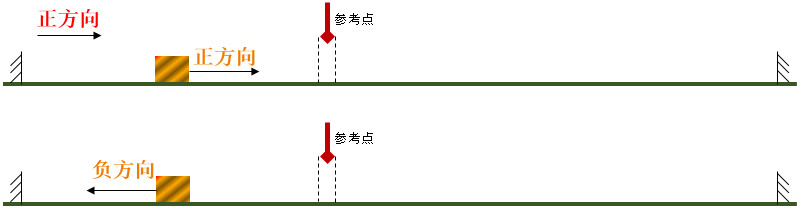
如果知道轴和参考点的相对位置,可以合理设置“逼近/回原点方向”来缩短回原点的路径。例如,以上图中的负方向为例,触发回原点命令后,轴需要先运行到左边的限位开关,掉头后继续向正方向寻找原点开关。
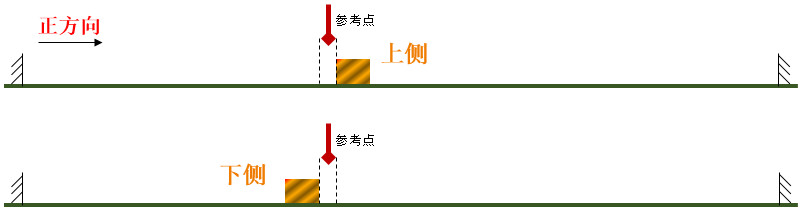
“上侧”指的是:轴完成回原点指令后,以轴的左边沿停在参考点开关右侧边沿。
“下侧”指的是:轴完成回原点指令后,以轴的右边沿停在参考点开关左侧边沿。
无论用户设置寻找原点的起始方向为正方向还是负方向,轴最终停止的位置取决于 “上侧”或“下侧”。
⑥逼近速度:寻找原点开关的起始速度,当程序中触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关。
⑦参考速度:最终接近原点开关的速度,当轴第一次碰到原点开关有效边沿儿后运行的速度,也就是触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关,当轴碰到原点开关的有效边沿后轴从“逼近速度”切换到“参考速度”来最终完成原点定位。“参考速度”要小于“逼近速度”,“参考速度”和“逼近速度”都不宜设置的过快。在可接受的范围内,设置较慢的速度值。
⑧起始位置偏移量:该值不为零时,轴会在距离原点开关一段距离(该距离值就是偏移量)停下来,把该位置标记为原点位置值。该值为零时,轴会停在原点开关边沿儿处。
⑨参考点位置:该值就是⑧中的原点位置值。
如下图所示,用例子来说明轴主动回原点的执行过程。根据轴与原点开关的相对位置,分成4种情况:轴在原点开关负方向侧,轴在原点开关的正方向侧,轴刚执行过回原点指令,轴在原点开关的正下方。
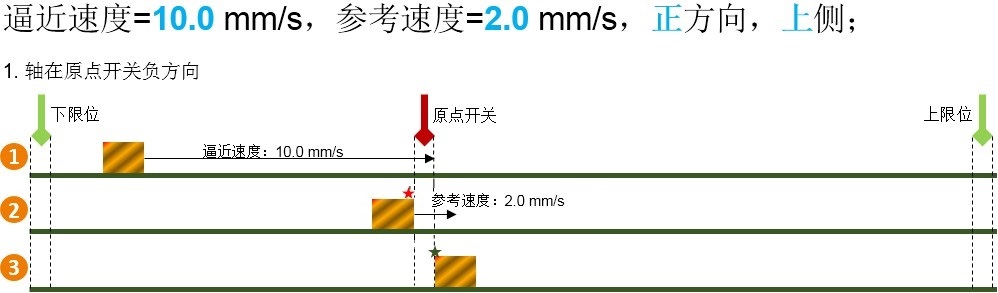
①当程序以Mode=3触发MC_Home指令时,轴立即以“逼近速度 10.0mm/s”向右(正方向)运行寻找原点开关;
②当轴碰到参考点的有效边沿,切换运行速度为“参考速度2.0mm/s”继续运行;
③当轴的左边沿与原点开关有效边沿重合时,轴完成回原点动作。
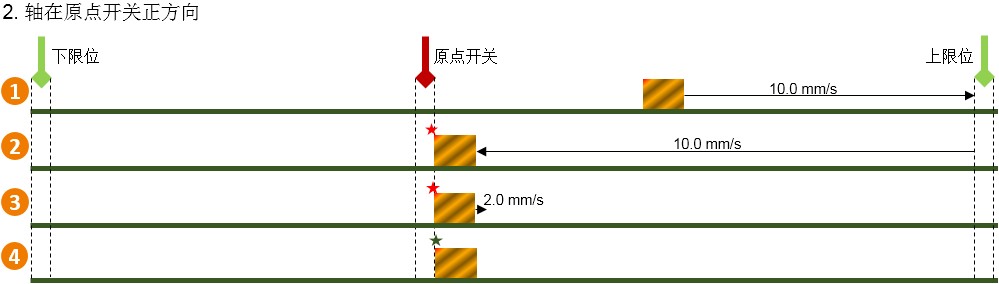
①当轴在原点开关的正方向(右侧)时,触发主动回原点指令,轴会以“逼近速度”运行直到碰到右限位开关,如果在这种情况下,用户没有使能“允许硬件限位开关处自动反转”选项,则轴因错误取消回原点动作并按急停速度使轴制动;如果用户使能了该选项,则轴将以组态的减速度减速(不是以紧急减速度)运行,然后反向运行,反向继续寻找原点开关;
②当轴掉头后继续以“逼近速度”向负方向寻找原点开关的有效边沿;
③原点开关的有效边沿是右侧边沿,当轴碰到原点开关的有效边沿后,将速度切换成“参考速度”最终完成定位。
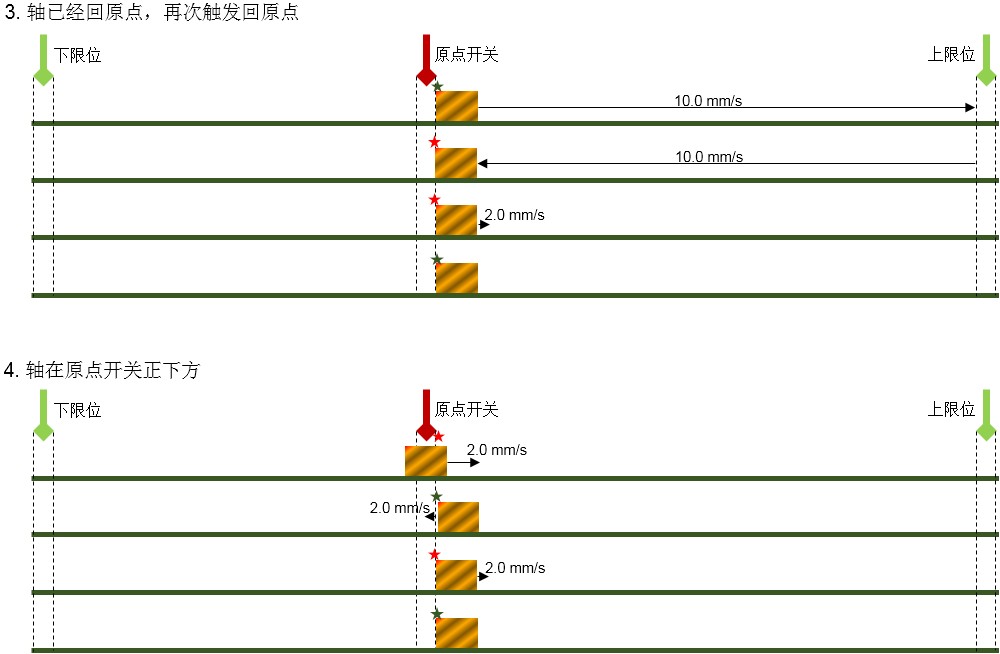
上图中的3和4说明了两种特殊情况下轴的回原点的过程。
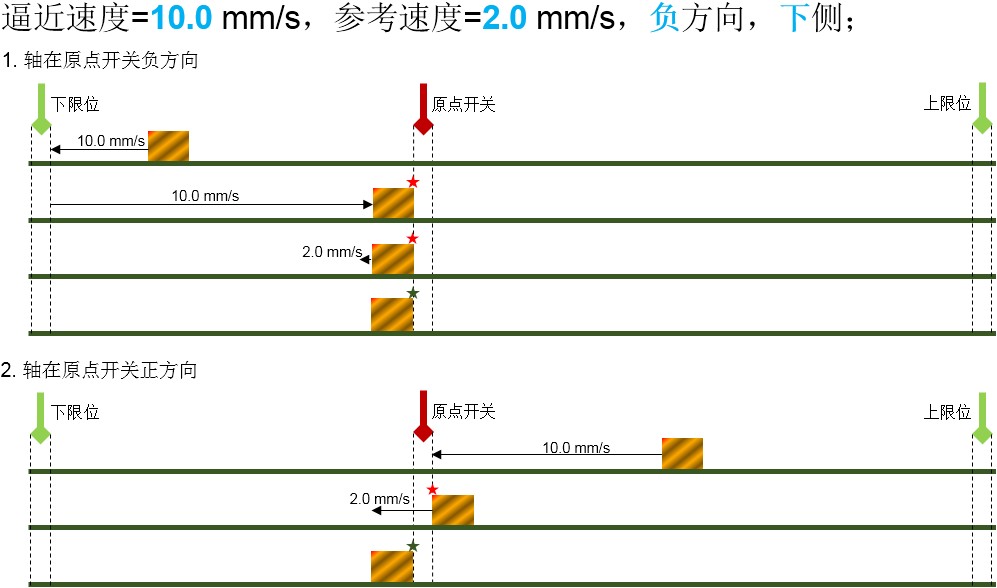
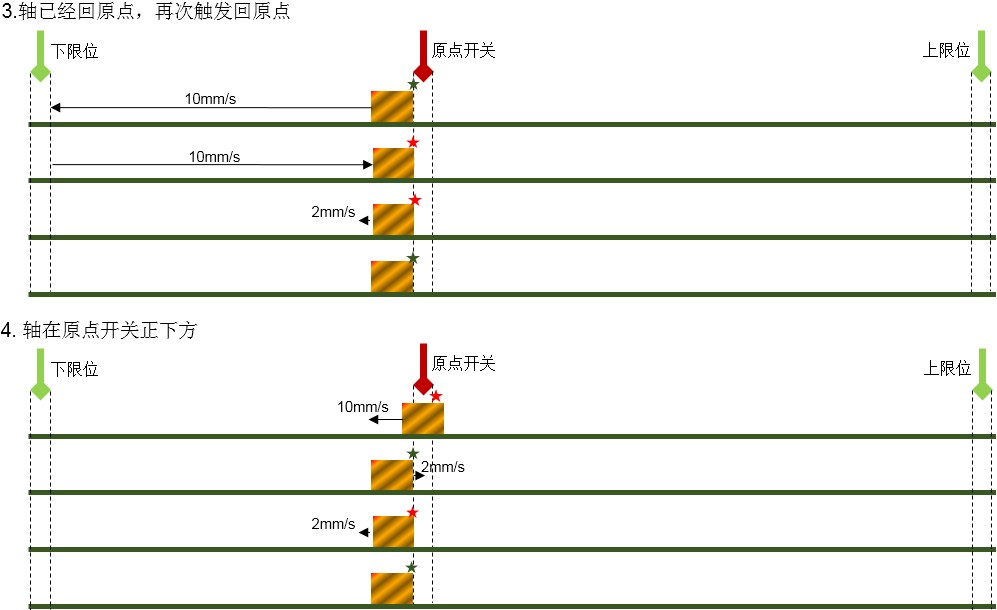
下图以4种情况来说明轴以“负方向”和“下侧”的方式主动回原点的过程。
被动
被动回原点指的是:轴在运行过程中碰到原点开关,轴的当前位置将设置为回原点位置值。
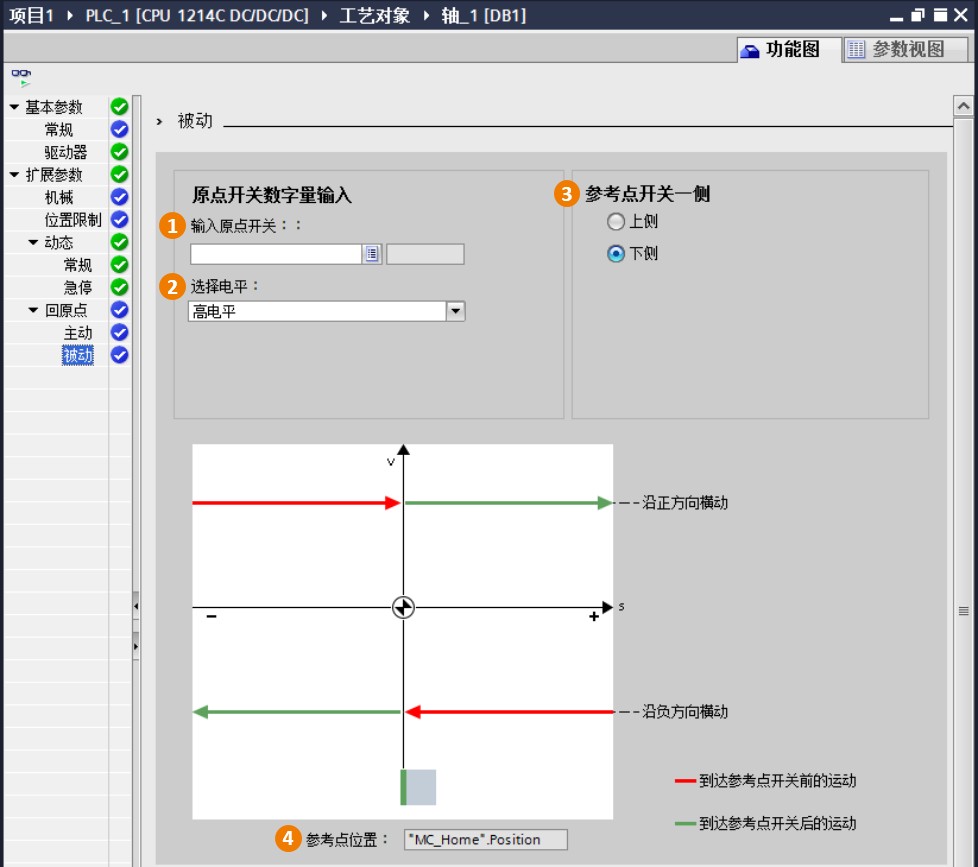
①输入原点开关:参考主动会原点中该项的说明。
②选择电平:参考主动回原点中该项的说明。
③参考点开关一侧:参考主动回原点中第5项的说明。
④参考点位置: 该值是MC_Home指令中“Position”管脚的数值。
用例子说明如何实现一个被动回原点的功能:
步骤一:在上图中选则“参考点开关一侧”为“上侧”;
步骤二:先让轴执行一个相对运动指令,该指令设定的路径能让轴经过原点开关;
步骤三:在该指令指令的过程中,触发MC_Home指令,设置模式为Mode=2.
步骤四:这时再触发MC_MoveRelative指令,要保证触发该指令的方向能够经过原点开关。
『结果』当轴以MC_MoveRelative指令指定的速度运行的过程中碰到原点开关的有效边沿时,轴立即更新坐标位置为MC_Home指令上的“Position”值,如下图所示。在这个过程中轴并不停止运行,也不会更改运行速度。直到达到MC_MoveRelative指令的距离值,轴停止运行。
『结论』
1. 被动回原点功能的实现需要MC_Home指令与MC_MoveRelative指令,或MC_MoveAbsolute指令,或是MC_MoveVelocity指令,或是MC_MoveJog指令联合使用。
2. 被动回原点需要原点开关。
3. 被动回原点不需要轴不执行其他指令而专门执行主动回原点功能,而是轴在执行其他运动的过程中完成回原点的功能。
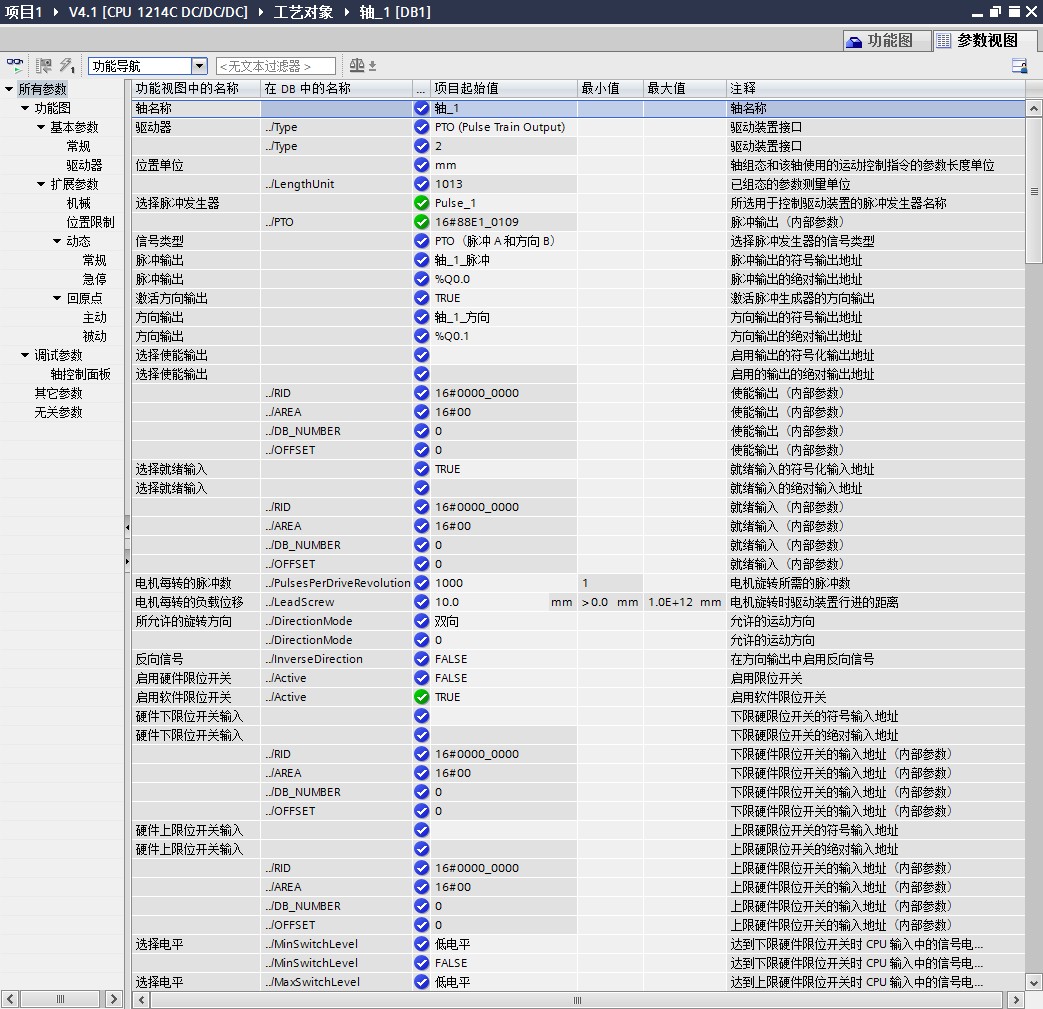
参数视图
当用户切换到工艺轴的“参数视图”时,可以看到轴的工艺对象所有参数的名称、起始值、最大值、最小值和注释。

剩余80%未阅读,请登录查看大全章节内容
- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错

















{{item.nickName}}