
















 西门子官方商城
西门子官方商城

- {{item.name}}
更多

MC_MoveVelocity

发布时间:2024年01月16日
- 0
- 20
MC_MoveVelocity 指令说明
MC_MoveVelocity
指令名称:速度运行指令
功能:使轴以预设的速度运行
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
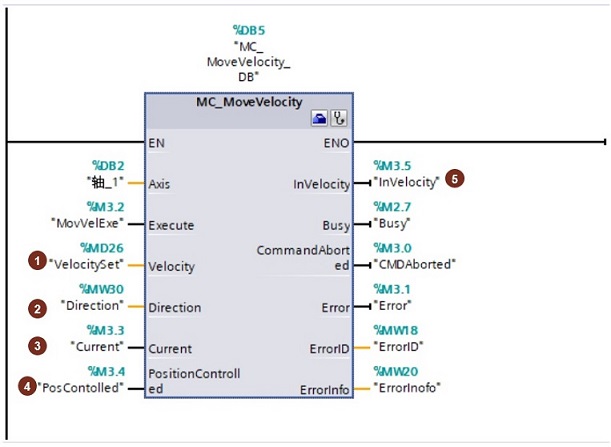
指令输入端:
①Velocity:轴的速度。
②Direction:方向数值
- Direction = 0:旋转方向取决于参数“Velocity”值的符号
- Direction = 1:正方向旋转,忽略参数“Velocity”值的符号
- Direction = 2:负方向旋转,忽略参数“Velocity”值的符号
③Current:
- Current = 0:轴按照参数“Velocity”和“Direction”值运行
- Current = 1:轴忽略参数“Velocity”和“Direction”值,轴以当前速度运行。
④PositionControlled:
- PositionControlled= 0:非位置控制即运行在速度控制模式
- PositionControlled= 1: 位置控制操作即运行在位置控制模式
『注意』 只要执行指令 MC_MoveVelocity 即应用该参数。之后,MC_Power 的设置再次适用。使用 PTO 轴时忽略该参数。
⑤InVelocity :
- InVelocity= 0:输出未达到速度设定值
- InVelocity= 1: 输出已达到速度设定值
『注意』可以设定“Velocity”数值为0.0,触发指令后轴会以组态的减速度停止运行。相当于MC_Halt指令。

剩余80%未阅读,请登录查看大全章节内容
- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错

















{{item.nickName}}